
image imagewidth (px) 1.92k 1.92k | frame_index int64 0 15.4k | video_id stringclasses 2
values |
|---|---|---|
0 | drone_video_1 | |
1 | drone_video_1 | |
2 | drone_video_1 | |
3 | drone_video_1 | |
4 | drone_video_1 | |
5 | drone_video_1 | |
6 | drone_video_1 | |
7 | drone_video_1 | |
8 | drone_video_1 | |
9 | drone_video_1 | |
10 | drone_video_1 | |
11 | drone_video_1 | |
12 | drone_video_1 | |
13 | drone_video_1 | |
14 | drone_video_1 | |
15 | drone_video_1 | |
16 | drone_video_1 | |
17 | drone_video_1 | |
18 | drone_video_1 | |
19 | drone_video_1 | |
20 | drone_video_1 | |
21 | drone_video_1 | |
22 | drone_video_1 | |
23 | drone_video_1 | |
24 | drone_video_1 | |
25 | drone_video_1 | |
26 | drone_video_1 | |
27 | drone_video_1 | |
28 | drone_video_1 | |
29 | drone_video_1 | |
30 | drone_video_1 | |
31 | drone_video_1 | |
32 | drone_video_1 | |
33 | drone_video_1 | |
34 | drone_video_1 | |
35 | drone_video_1 | |
36 | drone_video_1 | |
37 | drone_video_1 | |
38 | drone_video_1 | |
39 | drone_video_1 | |
40 | drone_video_1 | |
41 | drone_video_1 | |
42 | drone_video_1 | |
43 | drone_video_1 | |
44 | drone_video_1 | |
45 | drone_video_1 | |
46 | drone_video_1 | |
47 | drone_video_1 | |
48 | drone_video_1 | |
49 | drone_video_1 | |
50 | drone_video_1 | |
51 | drone_video_1 | |
52 | drone_video_1 | |
53 | drone_video_1 | |
54 | drone_video_1 | |
55 | drone_video_1 | |
56 | drone_video_1 | |
57 | drone_video_1 | |
58 | drone_video_1 | |
59 | drone_video_1 | |
60 | drone_video_1 | |
61 | drone_video_1 | |
62 | drone_video_1 | |
63 | drone_video_1 | |
64 | drone_video_1 | |
65 | drone_video_1 | |
66 | drone_video_1 | |
67 | drone_video_1 | |
68 | drone_video_1 | |
69 | drone_video_1 | |
70 | drone_video_1 | |
71 | drone_video_1 | |
72 | drone_video_1 | |
73 | drone_video_1 | |
74 | drone_video_1 | |
75 | drone_video_1 | |
76 | drone_video_1 | |
77 | drone_video_1 | |
78 | drone_video_1 | |
79 | drone_video_1 | |
80 | drone_video_1 | |
81 | drone_video_1 | |
82 | drone_video_1 | |
83 | drone_video_1 | |
84 | drone_video_1 | |
85 | drone_video_1 | |
86 | drone_video_1 | |
87 | drone_video_1 | |
88 | drone_video_1 | |
89 | drone_video_1 | |
90 | drone_video_1 | |
91 | drone_video_1 | |
92 | drone_video_1 | |
93 | drone_video_1 | |
94 | drone_video_1 | |
95 | drone_video_1 | |
96 | drone_video_1 | |
97 | drone_video_1 | |
98 | drone_video_1 | |
99 | drone_video_1 |
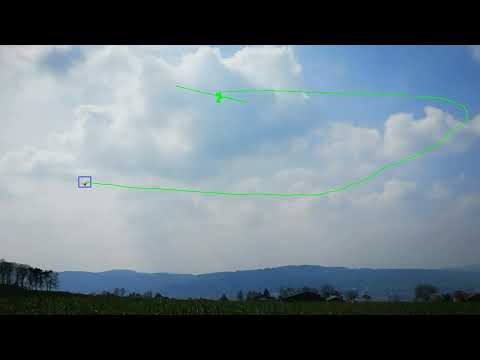
Output Tracking Videos
drone_video_1_tracked.mp4
drone_video_2_tracked.mp4

Dataset Choice and Detector Configuration
- For this project I used the Drone detection Computer Vision Model dataset from Roboflow to train the YOLO model. I chose this dataset because it contains 991 images of drones taken from many different angles and in many different environments which improves generalization.
- I used the YOLO model for object detection. I chose YOLO because it has better speed and efficiency than other models, and due to hardware limitations on my machine (I do not have the NVIDIA GPU and had to run on CPU). I set the confidence threshold to 0.25 so that it would be able to detect drones even when they are far away which happened frequently in the second test video.
Kalman Filter State Design and Noise Parameters
I initialized the Kalman filter with a 4d state vector that keeps track of both position and velocity. I also had a transition matrix that defines how the position should be updated based on velocity. The motion model assumes a constant velocity which allows the filter to predict the drone's position even if there are some missed detections.
Noise Parameter Description Value Used P Uncertainty of initial drone detection 10.0 R Expected variance in YOLO coordinates 5.0 Q Expected consistency of drone movement 0.01 I set P to 10 because the drone could initially be anywhere and the filter should have a high uncertainty in the initial coordinates which are (0,0). I set R to 5 since there could be slight variation in the YOLO coordinates even when the drone is not moving and I would not want the filter to detect movement when there is none. I set Q to 0.01 because I expected the drone to move at a relatively consistent velocity and not deviate much from it.
Failure Cases and Missed Detections
- The filter handles missed detections by using the last known position and velocity to predict the next coordinates and draw a line to those coordinates, and when the drone is detected again it redraws the line to the actual coordinates.
- The YOLO model fails to detect the drone in some frames where the drone is less visible but this is mitigated by the state prediction.
- Downloads last month
- 23